
方 勇,张建军
(国网兰州供电公司,甘肃 兰州 730050)
随着监控场景安全性的不断提高,智能视频监控受到越来越多的关注。智能视频监控系统可以较为智能地分析视频图像,获取监控场景中的信息[1]。运动目标检测是实现智能视频监控的基础,其研究具有重要的现实意义。通过参考文献可知,目前较为常用的有三种方式各有优缺点,背景减除法适用于静态背景检测[2]。光流法计算复杂,性能差[3]。帧差法提取轮廓,检测区域不完整[4]。在此基础上,提出了一种结合时空马尔可夫随机场(Spatial Temporal Markov Random Field,STMRF)模型和高斯混合模型(Gaussian Mixture Model,GMM)的运动目标检测方法。进行STMRF训练时利用GMM参数更新算法计算邻域图像分割区域的均值和方差,利用时空邻域标记场设置势函数。通过仿真验证了该方法的可行性。
考虑到目标检测过程中相邻帧之间的密切关系,建立了STMRF模型。视频中目标的运动与前后帧的序列图像高度相关。传统马尔可夫随机场目标分割的一大缺陷是缺乏视频序列的时间维信息[5]。文中提出的时空马尔可夫随机场模型考虑了空间域中相邻像素之间的相关性,在时域中增加了相邻帧像素之间的运动相关信息[6]。利用时空二阶邻域系统,定义了像素空间邻域势团和时间邻域势团。如图1所示。

图1 模型求解流程
能量函数扩展为如式(1)所示。

(1)
在式中,Vc(·)为势函数;
ω为像素分类的标记场;
c为与M相关的势群,M是N×N上的邻域系统;
C为M中全部势团集合。
在势团c定义中增加了像素点i在时间序列上相邻帧的二维邻域势团。STMRF模型如图2所示。

图2 STMRF模型
假设有二维平面图像S,si为S={s1,s2,…,sM×N}集合中的像素点,数量为M×N,图像观测数据为F,为f={f1,f2,…,fM×N},存在像素点集r={r1,r2,…,rM×N},像素分类标记场为ω={ωs1,ωs2,…,ωsM×N},ωs∈{1,2,…,L-1},类别总数L。
似然函数P(F|ω)符合高斯分布,如式(2)所示[7]。

(2)
在式中,μ和σ分别为高斯函数的均值和标准差。
对其取对数,如式(3)所示[8]。

(3)



(4)

(5)
在式中,It为像素值(当前帧)。
因为先验概率P(ω)与MRF模型匹配,所以MRF等价于Gibbs随机场,能量函数定义后就可以求出P(ω)[10]。
F为二维平面相对于邻域系统M的马尔可夫随机场,仅当F的联合分布是M相关势团的Gibbs分布。二维图像标记场的计算如式(6)所示[11]。

(6)
在式中,Z为归一化函数;
T是Temperature的简写,一般情况下T=1。
目标检测流程如下:
步骤1:读取图像并进行参数初始化,包括迭代收敛时间、均值、方差、图像标记场[12]。
步骤2:划分训练区域,对前N帧的μ和σ2进行初始化,使用GMM参数更新方法进行计算。
步骤3:对前N帧标记场的全局能量进行依次计算,如式(7)所示[13]。

(7)
在式中,S为平面点集;
F为观测图像数据;
ω为像素分类的标记场,ωs∈{1,2,…,L-1},L为类别总数。
判断该值与当前标记场的差值是否超过设置的阈值。如果Δ≥Ek-Ek-1,则转至下一步,并将阈值设置为0.01[14]。
步骤4:如果前后标记场的全局能量变化非常大,使用式(8)计算当前帧各像素局部能量[15]。

(8)
对局部能量累积值是否超随机值进行判断,如超过,保存当前标记场的值ωs=i。
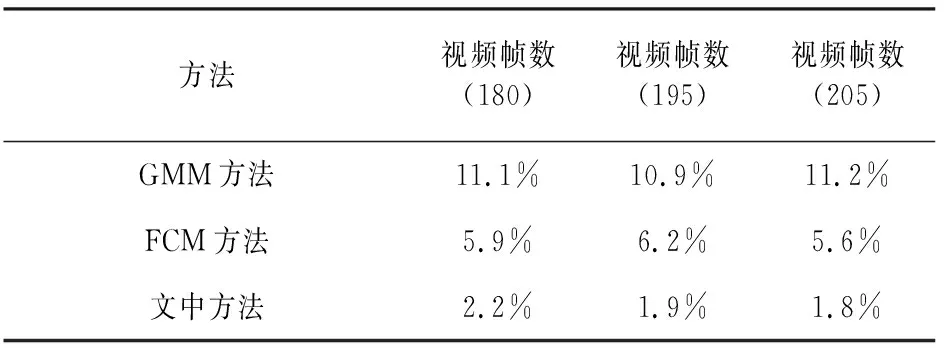
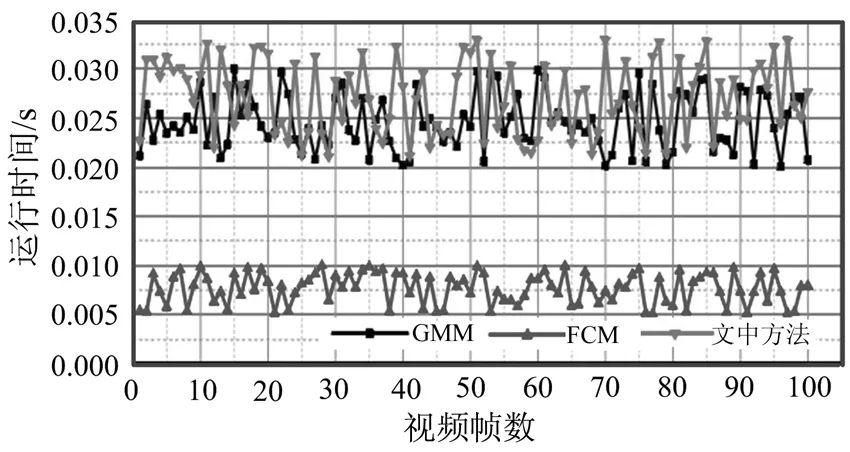
步骤5:如果前后标记场的全局能量趋于平衡,则算法结束(即Δ 图3所示为改进STMRF模型的目标检测流程。 图3 目标检测流程 仿真设备为联想PC,操作系统为Windows 10 64位旗舰版,Intel i52450m CPU,频率2.5 GHz,内存8GB,算法程序采用Visual Studio平台的OpenCV库实现。为了验证该方法的优越性和有效性,将该方法与高斯混合模型和模糊C-均值聚类(FCM)进行了比较。仿真数据来自KTH、Weizmann视频数据库,通过数据库片段进行测试。仿真主要分析了目标检测的错误率和运行时间。 图4 (a)是来自KTH 视频数据库的行走视频片段第180帧、195帧和205帧的截图。视频帧高120像素,宽160像素,帧速率为每秒25帧,比特率为861 kbps。对视频进行文中方法、GMM方法和FCM方法的目标检测。图4(b)为GMM方法检测的运动目标,图4(c)为FCM方法检测的运动目标,图4(d)为文中方法检测的运动目标。 从图4可以看出,与GMM方法和FCM方法相比,文中方法的检测结果更清晰,检测错误率最低。从检测错误率的计算结果来看,该方法比其他方法对目标的检测更准确,检测错误率约在2%左右,GMM方法的检测错误率在11%左右。FCM方法的检测错误率约在6%左右。表1所示不同方法检测错误率的结果比较。 表1 检测错误率结果对比1 图4 不同方法目标检测结果对比1 图5所示,不同方法目标检测的运行时间比较结果。从图5可以看出,文中方法的运行时间最长,与GMM方法的运行时间相差不大,而FCM方法的运行时间最短。这是因为文中方法在时间维度上增加了多帧计算,从而增加了计算时间。 图5 不同方法目标检测的运行时间对比1 图4 (a)为来自Weizmann视频数据库行走视频片段第21帧、28帧和36帧的截图。视频帧高144像素,宽180像素,帧速率为每秒25帧,比特率为15552 kbps。对视频进行文中方法、GMM方法和 FCM 方法的目标检测。图5(b)为GMM方法检测的运动目标,图5(c)为FCM方法检测的运动目标,图5(d)为文中方法检测的运动目标。 从图6可以看出,与GMM方法和FCM方法相比,文中方法的检测结果更清晰,检测错误率最低。从检测错误率的计算结果来看,该方法比其他方法对目标的检测更准确,检测错误率在2.5%左右,GMM方法检测错误率在9.5%左右,FCM方法检测错误率在6.5%左右。表2所示不同方法检测错误率的结果比较。 图6 不同方法目标检测结果对比2 表2 检测错误率结果对比2 图7所示为不同方法目标检测运行时间的比较结果。从图7可以看出,文中方法的运行时间最长,与GMM方法相差不大,FCM方法的运行时间最短。这是因为文中方法在时间维度上增加了多帧计算,从而增加了计算时间。 图7 不同方法目标检测的运行时间对比2 从以上实验结果可以看出,相比于传统的GMM方法和FCM方法,该方法能够检测复杂背景下的运动目标,具有更好的检测效果和较强的鲁棒性。 提出了一种时空马尔可夫随机场模型和高斯混合模型相结合的运动目标检测方法。在训练时空马尔可夫随机场模型时,采用高斯混合模型的参数更新算法计算邻域图像分割区域的均值和方差,并通过时空邻域标记场设置势函数。结果表明,与传统的GMM和FCM目标检测方法相比,文中方法能够检测复杂背景下的运动目标,检测效果更好,有较好的鲁棒性。受目前实验室硬件和数据规模的影响,文中方法仅研究目标检测方法。在此基础上,后续将对目标跟踪和行为识别等做进一步研究。
3.1 仿真参数
3.2 结果与分析




版权所有:上派范文网 2010-2024 未经授权禁止复制或建立镜像[上派范文网]所有资源完全免费共享
Powered by 上派范文网 © All Rights Reserved.。沪ICP备12033476号-1