
靳睿敏,郭艺,杨会贇,车磊,徐文璞,甄卫民
(1.中国电波传播研究所,电波环境特性及模化技术重点实验室,山东 青岛 266107;
2.西安电子科技大学,西安 710071;
3.北京卫星导航中心,北京 100094)
全球卫星导航系统(GNSS)信号落地功率低,极易受到干扰,小功率的干扰就能影响数公里范围的卫星导航信号[1].影响GNSS 的干扰主要包括:非故意干扰和故意干扰.非故意干扰主要源于生产生活中所使用的电子系统,故意干扰由人为产生,按照干扰手段,故意干扰又可分为压制式干扰和欺骗式干扰.
在大多数国家,尽管干扰机的使用是违法的,但廉价的干扰机能够使货车司机、租车者等避免对其位置的监控,这使得近些年来卫星导航干扰案例频发,对卫星导航的各种军民应用造成了严重的威胁.卫星导航干扰的频发和对各种卫星导航造成的严重影响受到了国内外广泛的关注.
排除干扰源,首先要对干扰进行检测、识别和定位.但是卫星导航信号弱,到达接收机天线较低功率的干扰能对卫星导航造成影响,通用的频谱监测设备无法实现对卫星导航产生影响的弱干扰的监测,以GPS 信号C/A 码为例,落地功率为-130 dBm,通常的接收机捕获要求载噪比(C/N0)约30 dB·Hz.因此,要求噪声功率谱密度为-160 dBm/Hz,即高于-160 dBm/Hz的噪声就对信号的捕获有干扰.然而,通常频谱监测的灵敏度为-150 dBm/Hz,所以采用频谱监测的方法大约有10 dB 的弱干扰检测不到,无法直接监测到弱干扰信号.
较弱的干扰会对卫星导航接收机的一些输出信息造成影响[2-4],比如自动增益控制(AGC)、C/N0、位置误差等,利用这些信息可实现卫星导航弱干扰检测.
本文基于接收机输出的AGC 信息、C/N0以及位置信息实现卫星导航弱干扰检测、压制干扰和欺骗干扰的识别.
接收机收到的卫星导航信号是淹没在噪声中的,卫星信号功率起伏不会引起接收机接收到的总功率的波动.然而干扰的功率在噪声之上,接收机收到的信号总功率将会随之发生变化.为了保证ADC 不会发生饱和,在射频通道中采用AGC 环路[5-6],如图1所示.
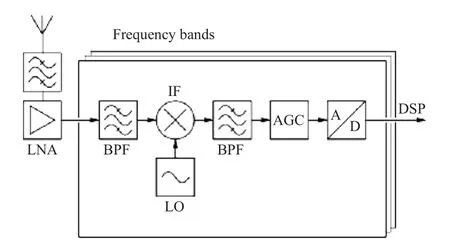
图1 接收机射频前端
模拟控制电压对AGC 的影响为

式中:VAGC为AGC 控制电压;
α 为AGC 增益系数;
β为AGC 控制电压系数.
AGC 随着干扰和信号之间的比值J/S的增加而减小,其梯度取决于干扰的类型,单频连续波干扰对AGC 增益的影响最大,而带限白噪声(WN)对AGC的影响最小[7].图2显示了Ublox 接收机的数字AGC随着宽带干扰J/S变化的曲线图,可以看出,随着干扰的增大,AGC 逐渐减小.
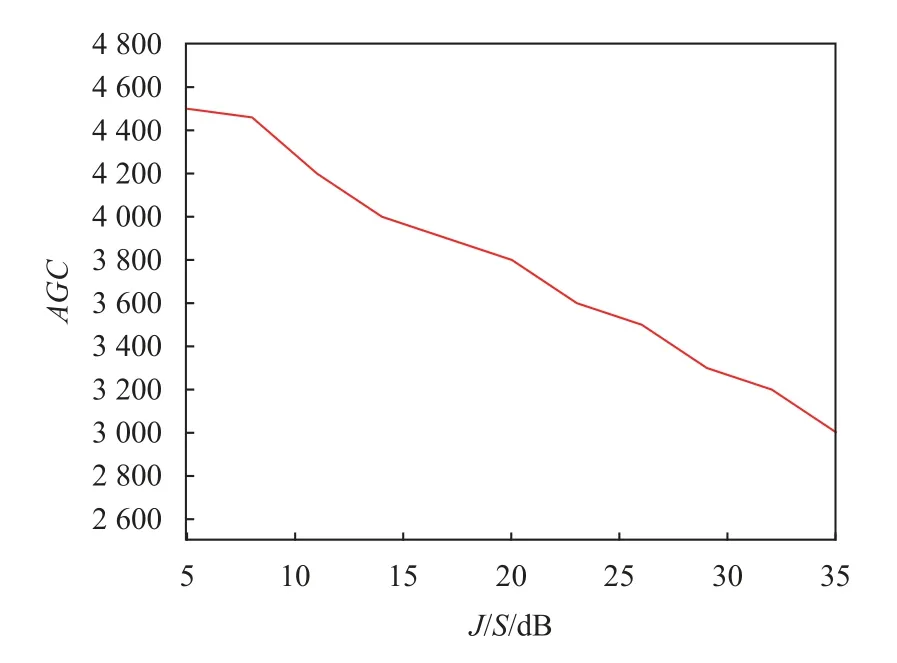
图2 AGC 随J/S 变化曲线
C/N0是GNSS 接收机重要的输出量.C/N0被应用于卫星导航压制干扰检测[8-9]和欺骗干扰检测[10-11]中.
C/N0的估计是建立在噪声为WN 的假设基础上的,因而可以用噪声密度来表征,在有干扰的情况下,分析信号与干扰加噪声比(SINR)十分繁琐,但可通过一定的转换得到干扰条件下等效的C/N0.
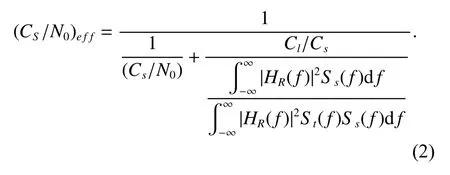
简化得
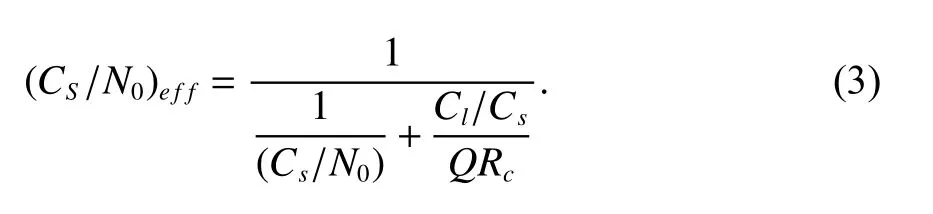
式中:CS/N0为接收机未受干扰时的C/N0;
Cl/Cs为干扰功率与卫星信号功率比;
Q为由调制器和干扰所决定的抗干扰品质因数;
Rc为扩频码码速率.
以宽带干扰为例,存在宽带干扰时的等效C/N0为

式中:S为无干扰时卫星信号功率;
I为宽带干扰功率.
图3为理论和实际C/N0随着宽带干扰J/S变化的曲线图.
如果GNSS 接收机受干扰后仍然能够捕获和跟踪,将会输出位置信息,但由于影响到伪距的计算,会使得位置的误差增大,图4显示了未受干扰以及在不同干扰功率下的位置信息输出[12].可以看出,接收机受干扰后,位置偏差会增大,干扰功率越大,位置偏差越大.
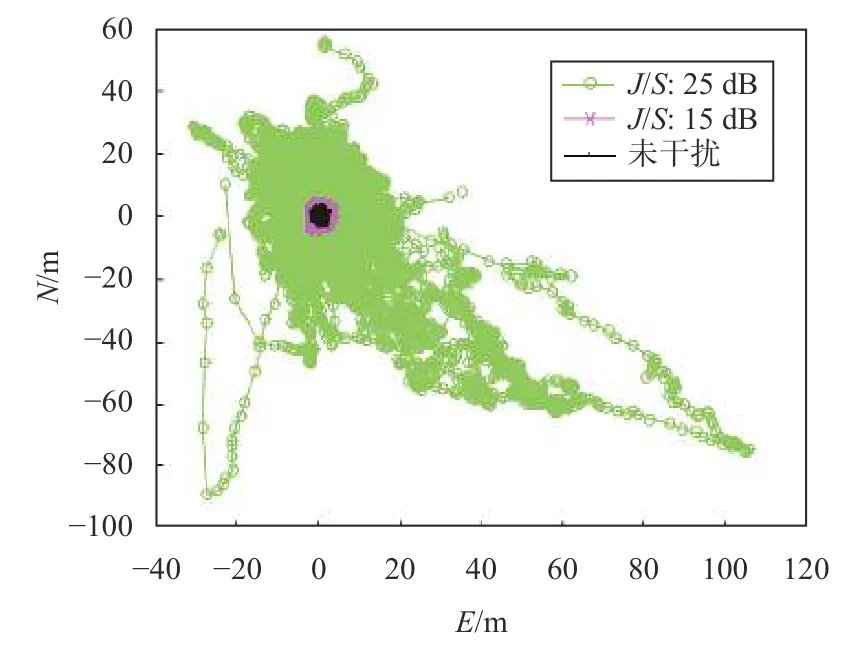
图4 在未干扰和干扰情况下的位置信息输出
通过以上分析,卫星导航弱干扰会对接收机的AGC、C/N0以及位置的输出会造成影响.弱压制干扰和欺骗干扰对AGC、C/N0以及位置输出的影响对比如表1所示.
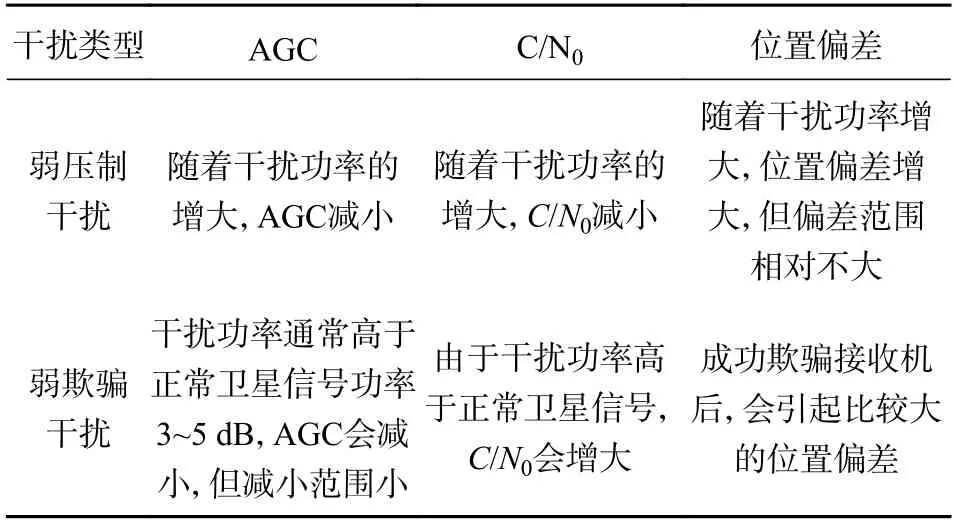
表1 干扰对 AGC、C/N0 及位置输出的影响
由表1可知,压制干扰和欺骗干扰对AGC、C/N0以及位置输出的影响是不一样的,本文联合利用AGC、C/N0以及位置的输出实现压制干扰和欺骗干扰的检测识别.
AGC、C/N0以及位置的输出量是和接收机具体的硬件相关的,为了减弱这些输出量对硬件的依赖,做如下的处理.
对AGC、C/N0以及位置监测量分别在时间序列上进行加窗,如图5所示,每个窗包含N个采样值,假设采样时间频率为Ts,则窗的时间长度为NTs.
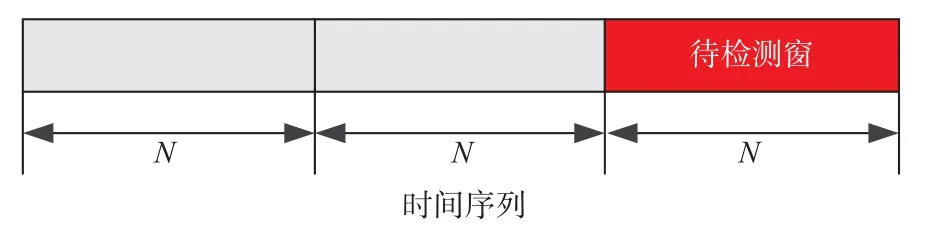
图5 对输出量进行加窗
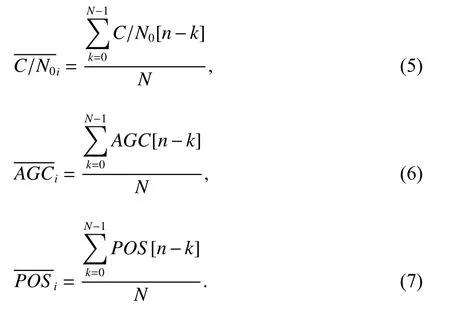
计算每个变量加窗后的平均值:
式中:n为当前采样序列对应的时刻;
i为第i个窗;
N为每个窗包含的采样数;
k为每个窗里的第k个采样;
C/N0为所有可见星的C/N0均值;
AGC为接收机的AGC 输出;
POS为经纬度坐标;
为第i个窗的C/N0均值;
为第i个窗的AGC均值;
表示第i个窗的位置均值.
通过联合利用AGC、C/N0以及位置的输出实现待检测窗的干扰判别,干扰检测判别量为

当T>Th(Th为判别阈值),则判别该检测窗内存在干扰,如果某个检测窗一旦判别发生干扰时,式(8)中下一个检测窗的干扰判别将不与前一个受干扰的检测窗作为对比,而是与不受干扰的检测窗进行对比.
利用该方法能够判别是否存在干扰,但无法对压制干扰和欺骗干扰进行识别.检测到干扰后,再进一步对压制干扰和欺骗干扰进行识别.
记:
通过 ΔC/N0、ΔAGC和 ΔPOS得到压制干扰和欺骗干扰识别的权值,从而实现压制干扰和欺骗干扰的识别.将利用 ΔC/N0判别为压制干扰和欺骗干扰的权重记为wj1、ws1,利用 ΔAGC判别为压制干扰和欺骗干扰的权重记为wj2、ws2,利用 ΔPOS判别为压制干扰和欺骗干扰的权重记为wj3、ws3.
wj1、ws1、wj2、ws2、wj3、ws3的计算分别为:
由于不同的接收机输出的AGC 的意义不一样,式(13)中未给出 ΔAGC的阈值,对具体的接收机通过数据采集来获取该阈值.
记判别压制干扰和欺骗干扰的总权重分别为wj,ws,由式(12)~(14)可得:


当wj≥ws时判别为压制干扰,当wj<ws时,判别为欺骗干扰.
Ublox NEO-M8N 能够输出AGC、C/N0以及位置信息.利用Ublox NEO-M8N 对本文提出的方法进行验证,搭建的压制干扰数据采集环境如图6所示.蘑菇头天线接收真实卫星信号,AV1485 射频信号发生器产生压制干扰,真实卫星信号和压制干扰信号通过合路器输入到Ublox 接收机处理板,输出信息通过串口传输到上位机软件.采集一段没有加入干扰的数据后再加入压制干扰.调节压制干扰功率,压制干扰制式等,共采样了200 条在时间序列上包含无干扰和不同压制干扰情况下AGC、C/N0及位置信息输出.
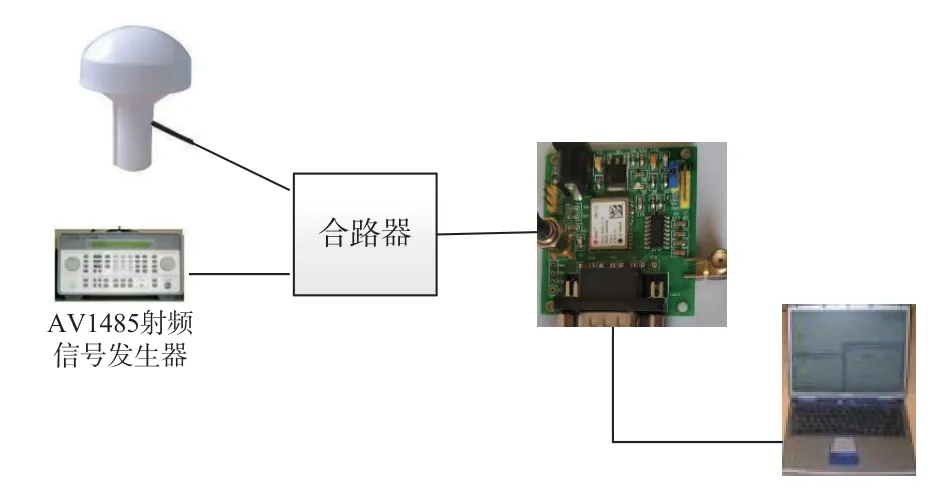
图6 压制干扰数据采集环境搭建
搭建的欺骗干扰数据采集环境如图7示.蘑菇头天线接收真实卫星信号,SPIRENT GSS9000 GNSS Generator 产生欺骗干扰,真实卫星信号和欺骗干扰信号通过合路器输入到Ublox 接收机处理板,输出信息通过串口传输到上位机软件.采集一段没有干扰存在的数据后再加入欺骗干扰,调节欺骗干扰功率、码偏移,共采样了200 条在时间序列上包含无干扰和不同欺骗干扰情况下的AGC、C/N0及位置信息输出.
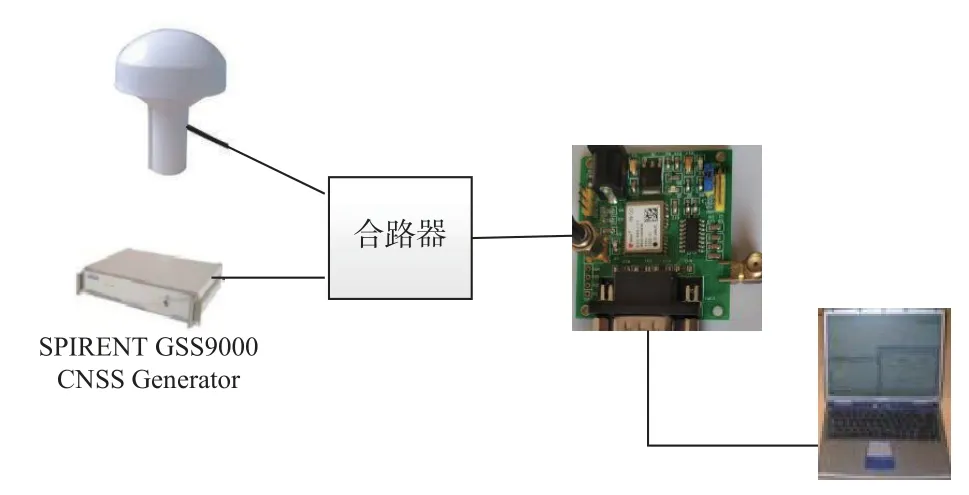
图7 欺骗干扰数据采集环境搭建
随机抽取100 组包含压制干扰时的输出数据和100 组包含欺骗干扰时的输出数据以确认检测阈值Th以及式(13)中的AGC 阈值.剩余的100 条包含压制干扰的输出数据和100 条包含欺骗干扰的输出数据作为干扰检测和识别的测试集.测试集中对包含压制干扰和欺骗干扰的数据进行标注.
测试的200 条数据同时输入到本文提出的干扰检测算法中,经过测试,有192 条被判别为了存在干扰,干扰检测准确率为
检测出的192 条数据与标注好的压制干扰和欺骗干扰标签进行对比,其中有95 条数据为包含欺骗干扰的输出数据,97 条数据为包含压制干扰的输出数据.
将192 条识别出存在干扰的数据输入到本文提出的欺骗干扰和压制干扰识别算法中,准确识别出的包含欺骗干扰的数据共有92 条,准确识别出的包含压制干扰的数据共有90 条,识别准确率为

要排除GNSS 干扰源,首先要对GNSS 干扰进行检测、识别和定位.本文提出了利用接收机输出的AGC、C/N0及位置信息实现卫星导航弱压制干扰和欺骗干扰的检测与识别的方法.为减轻这些输出量对硬件的依赖,对AGC、C/N0以及位置的输出量进行时间序列上的加窗.对窗之间的三个监测量变化的绝对值进行求和,并与设定的阈值进行对比,实现了干扰的检测.对窗之间的C/N0、AGC 变化量以及位置误差的绝对值赋予压制干扰和欺骗干扰识别的权重,实现了压制干扰和欺骗干扰的识别.
通过搭建实际环境,测取实测数据对本文的方法进行测试,测试结果表明,本文的方法能够实现欺骗干扰和压制干扰的检测与识别,检测准确率能够达到96%,压制干扰和欺骗干扰的识别准确率能够达到94%.
猜你喜欢压制接收机噪声噪声可退化且依赖于状态和分布的平均场博弈数学年刊A辑(中文版)(2020年3期)2020-10-27一种用于调幅接收机AGC的设计与实现测控技术(2018年6期)2018-11-25一种新型无人机数据链抗压制干扰技术的研究测控技术(2018年1期)2018-11-25一种面向ADS-B的RNSS/RDSS双模接收机设计电子制作(2018年19期)2018-11-14空射诱饵在防空压制电子战中的应用无人机(2018年1期)2018-07-05控制噪声有妙法中学生数理化·八年级物理人教版(2017年9期)2017-12-20数字接收机故障维修与维护电子制作(2016年1期)2016-11-07基于多接收机的圆周SAR欺骗干扰方法系统工程与电子技术(2016年4期)2016-08-24压制黄土塬区复杂地表条件下折射多次波的组合激发技术采矿与岩层控制工程学报(2015年3期)2015-12-16对GPS接收机带限高斯噪声压制干扰的干扰带宽选择分析弹箭与制导学报(2015年1期)2015-03-11版权所有:上派范文网 2010-2024 未经授权禁止复制或建立镜像[上派范文网]所有资源完全免费共享
Powered by 上派范文网 © All Rights Reserved.。沪ICP备12033476号-1