
胡军 张锦江 宗红
(北京控制工程研究所,北京 100094)
我国载人航天工程从1992年立项至今30年来,已经全部完成工程立项之初确定的“三步走”发展战略,共发射了5艘神舟无人飞船、1艘新一代载人飞船试验船、10艘神舟载人飞船、5艘货运飞船、2个空间实验室、空间站核心舱、问天实验舱和梦天实验舱,突破和掌握了载人航天器天地安全返回、空间交会对接、航天员出舱活动三大载人航天基本技术,突破和掌握了推进剂在轨补加、再生式生保、组合体控制、空间机械臂在轨操控等空间站运营核心技术,完成了空间站建造任务。载人航天器制导导航与控制(GNC)系统是载人航天器核心系统之一,GNC技术是载人航天工程的基础性和关键性技术。其中,载人飞船天地安全返回GNC基本技术直接关乎航天员的生命安全,要求最高的可靠性与安全性;
空间交会对接GNC基本技术,直接支持载人飞船、货运飞船与空间实验室、空间站核心舱的交会对接,空间站实验舱与空间站核心舱的交会对接,巡天空间望远镜与空间站核心舱的交会对接;
空间站组合体控制技术直接支持空间站长期在轨运营安全。
本文介绍了我国载人航天器GNC系统各个发展阶段的技术突破、技术演化及继承推广,对载人航天器GNC技术的未来发展进行了展望。
(1)待发段。惯性测量单元(IMU)调平和方位对准;
运载火箭故障下的零高度应急救生。
(2)发射段。惯性导航;
运载火箭故障下的应急救生。以整流罩分离为界,分为大气层内应急救生4种模式、大气层外应急救生4种模式;
大气层内应急救生的目标是返回,大气层外应急救生中有2种模式的轨道能量较低,目标是返回(1种有落区控制要求),另外2种模式的轨道能量较高,目标是先利用变轨进入轨道,之后提前返回。
(3)交会对接段。①运载火箭正常入轨,GNC系统自主完成与空间站的直接式交会对接;
导航方法为星敏感器(STS)/卫星导航/捷联惯性组合或红外地球敏感器(IRES)-太阳敏感器/卫星导航/捷联惯性组合;
制导方法为远程交会导引采用轨道参数协同控制方法,中近程交会导引采用C-W制导、视线制导、六自由度制导;
控制方法为喷气相平面控制,喷管最优分配。轨道运行期间,根据太阳方位采用对地三轴稳定或偏航机动(该技术是针对运行于倾斜轨道的太阳翼为单自由度转动的航天器,为同时兼顾能源和对地测控通信,在神舟三号飞船轨道舱开发的,现已成熟应用,推广到各类载人航天器及导航、探月等其他航天器),控制太阳翼对日;
响应航天员发起经数管转发的自主应急返回。②运载火箭入轨高度过高或过低时,评估在空间站组合体变轨配合情况下飞船推进剂能否支持完成交会对接与返回。如果能,则在地面支持下完成远程交会导引和中近程自主交会对接;
如果不能,则实施提前返回。
(4)组合体停靠期间,控制太阳翼对日。
(5)载人飞船撤离空间站后,完成IMU标定,轨道舱泄压期间的姿态稳定,完成太阳翼归零等返回准备。
(6)在轨期间,一旦失去姿态基准,具备对日安全模式;
自动控制失效,具备人工控制姿态和太阳翼;
平移靠拢段光学成像敏感器故障、不能提供任务支持情况下,利用人控计算机、人控摄像机、控制手柄、IMU、仪表面板、显示屏、推进系统等,完成平移靠拢段人控交会对接。
(7)完成返回一次调姿、轨道舱分离后的姿态稳定,返回二次调姿和离轨制动;
离轨期间,稳定载人飞船姿态,进行离轨制导计算;
进行组合导航,推进舱分离前切除卫星导航;
推进舱分离后,完成返回舱的姿态稳定,建立再入配平攻角。离轨完成后,持续进行返回再入自适应预测制导规划。
(8)再入大气层后,按照自适应预测制导给出的再入升力控制指令,控制返回舱倾侧角,同时稳定攻角和侧滑角,根据高度或累计视速度增量数据分别发回收系统主电源通信号和返回舱倾侧角归零指令,为开伞做准备。
(9)弹伞舱盖和开伞后,按指令对返回舱进行减旋控制。
考虑到货运飞船GNC主要完成交会对接功能,是载人飞船GNC功能的子集,本文在介绍飞船GNC技术时,主要介绍载人飞船GNC,必要时提及货运飞船GNC。
相对我国返回式卫星无控的弹道式再入在安全性方面存在再入过载大和落点散度大2个方面的不足,我国载人飞船对返回舱落点和再入过载有强制要求,必须采用具有质心偏置的大钝头返回舱构型和再入升力控制技术。为此,载人飞船配备了完整的GNC系统。
返回再入的前提条件是保证轨道运行段正确的姿态基准和正常的姿态控制。根据轨道数据(卫星导航或地面测定轨),IMU和光学姿态敏感器(如IRES、数字太阳敏感器(DSS)、STS)的测量信息,控制器中的姿态确定和控制算法,计算、确定航天器的姿态,按控制规律向推进系统发姿态控制指令。
神舟飞船轨道段的姿态控制,以及返回调姿、离轨制动、滑行段、返回舱攻角调整等阶段的姿态控制,继承了我国返回式卫星相平面控制方法。相平面控制是一种不依赖被控对象模型的无模型控制(MFC)方法,原本是针对刚体、无时延航天器开发的,返回式卫星由蓄电池供电,是刚体卫星,相平面控制方法完全适用;
而神舟飞船带有左右大型可驱动挠性太阳翼,是刚-柔耦合航天器,配置全数字化的姿态敏感器、控制器、驱动器、推力器,姿态控制回路时延较大,轨道控制和交会对接过程中伴随的姿态干扰力矩、发动机羽流扰动力矩、姿态控制与轨道控制耦合,一般的相平面控制参数设计方法难以兼顾稳定性、抗扰动性和控制性能,神舟飞船相平面控制方法的研究和实施经历了3个阶段:神舟一号和神舟二号抗时延抑制挠性的最小脉宽控制;
神舟三号~神舟七号抗时延抑制挠性抵抗内外扰动的最小脉宽与比例微分(PD)控制;
神舟八号以来统一的低增益相平面控制,保证了在时延、挠性、包括羽流在内的航天器内外扰动、姿态轨道控制耦合等不利因素共存下的姿态控制系统的闭环稳定性和控制性能。
再入段滚动姿态控制采用PD+大角度偏差下的额定速度跟踪+滞环组合规律,俯仰、偏航角速度阻尼采用滞环控制。
神舟飞船返回再入段的导航和制导技术的发展历经2个阶段。
第1个阶段,神舟一号~神舟十一号载人飞船。①返回再入GNC采用中等精度组合导航。惯性器件采用液浮惯性测量单元(FIMU)、挠性惯性测量单元(DIMU),光学姿态敏感器采用IRES和DSS。返回前的轨道数据来自地面测定轨,姿态数据来自IMU+IRES修正,或IMU+IRES/DSS双矢量定姿修正,或IMU+IRES修正+DSS偏航修正。离轨制动前完成返回初始化,返回段飞船运动参数由FIMU和DIMU组合提供的捷联惯性导航(SIN)提供。②返回再入GNC采用标准弹道制导方法。通过机理层次对气动参数变化对开伞点精度的影响分析,采用升阻比在线实时估计的再入纵向和横向自适应标准弹道制导方法,制导控制精度达到了国际先进水平。
第2个阶段,空间站时代第1艘载人飞船神舟十二号起。①返回再入GNC采用高精度组合导航,惯性器件更改为光纤IMU和二浮IMU,光学姿态敏感器增加了2台STS。从飞船发射到飞船落地,统一导航坐标系,全程一体化导航,待发段、发射段、轨道段、返回段导航数据连续衔接,不再有基本导航数据的初始化过程。返回前的轨道数据除了来自地面测定轨数据外,北斗卫星导航数据并作为首选,姿态数据的来源增加了IMU+STS修正并作为优选。返回再入段在推进舱分离前,采用STS/卫星导航/IMU组合导航;
推进舱分离后,采用光纤IMU和二浮IMU组合提供的SIN。神舟十二号起的导航方案,将1993年方案论证阶段设想的STS/卫星导航/SIN组合转化为现实。②返回再入GNC采用自适应预测制导方法,它是以自适应的弹道预测+基于标称状态的时变动态增益变换+基于一阶特征模型的自适应制导为长周期外环,生成制导策略和规划弹道,以标准弹道自适应纵向和横向制导为内环,高精度跟踪外环生成的弹道,外环与内环按周期持续运行直至完成任务,复杂工况的适应性和动力学及环境参数变化的鲁棒性得到极大提升,见图1。

图1 空间站时代神舟载人飞船返回再入GNC系统框图Fig.1 GNC system block diagram of Shenzhou manned spacecraft reentry in space station era
自适应预测制导方法成功应用于2014年嫦娥五号飞行试验器、2020年新一代载人飞船试验船和嫦娥五号月球探测器、2021年神舟十二号载人飞船、2022年神舟十三号和神舟十四号载人飞船,6次返回再入的精度位居国内所有半弹道式返回再入的前六位,神舟十二号、神舟十三号、神舟十四号返回再入的精度全面超过以往神舟载人飞船的飞行结果,我国半弹道式航天器返回再入的制导控制精度达到了国际领先水平。神舟十二号起的返回再入制导方案,将1995年载人飞船返回控制技术攻关总结报告中“研究尚不充分,只能作为研究方案”的落点预报方法,经深入研究和实践后升级为主方案,完成了载人航天器天地安全返回基本技术的更新换代[1-5]。
空间交会对接过程包括3个飞行阶段。
(1)运载火箭发射段。按照目标飞行器轨道,运载火箭在要求的发射窗口起飞,将追踪航天器送入轨道,满足轨道面、半长轴、偏心率、近地点幅角和与目标航天器相位差的要求。
(2)远程导引段。远程导引有2种实现方式。①地面远程导引。地面远程导引根据地面测控站、海上测控船和天基中继卫星组成的测控通信网,测量追踪航天器和目标航天器的轨道数据,飞控中心技术人员计算轨道控制参数并注入追踪航天器,追踪航天器执行变轨机动,完成半长轴调整、相对相位调整、轨道倾角和升交点误差修正,从初始轨道变为与目标航天器共面且其高度略低于目标航天器的近圆轨道。②追踪航天器自主远程导引。自主远程导引则是利用追踪航天器导航确定的自身轨道及发射前注入的目标航天器轨道根数,实时计算远程导引轨道控制策略并执行。自主远程导引相对地面远程导引,省去了测定轨、测控中心计算、校核、注入等环节,实时定轨、实时计算和实时控制,自主远程导引能够快速完成,而远程导引占整个交会对接时间的大部分,因此自主远程导引直接支持了快速交会对接。快速交会对接的需求反过来给运载火箭提出更小的入轨点距目标航天器的相位差要求。神舟八号~神舟十号载人飞船与天宫一号目标飞行器、神舟十一号载人飞船与天宫二号空间实验室采用的是2天5次地面远程导引,第28圈转入近程自主交会对接。空间站时代从神舟十二号载人飞船起,采用入轨3圈内完成飞船自主远程导引,以此为特征实现了载人飞船与空间站的快速交会对接。
(3)近程自主交会对接。载人飞船和对接目标上配置差分卫星导航、微波雷达及应答机(WR)、激光雷达及合作目标(LR)、光学成像敏感器及合作目标(相机型交会对接敏感器(CRDS)或CCD-标志灯型)等相对测量设备,加上其他敏感器(如IMU,IRES,DSS,STS),完成100 km以内的位置、速度、姿态和姿态角速度的相对测量,完成近距离内的自主交会对接。交会对接各相对测量设备的测量范围及选择策略见表1。其中,120 m内的平移靠拢段,既可自动控制执行,也可人工控制完成。人工控制使用的主要测量设备是电视摄像机、十字靶标和IMU,IRES和LR作为辅助支持设备,航天员操纵平移和姿态控制手柄给出控制指令,人控计算机处理测量和控制信息向推进系统发出工作指令。历次载人飞船主任务交会对接都是自动控制完成的,神舟九号和神舟十号进行了2次120 m内平移靠拢段人控交会对接试验。神舟八号~神舟十号的平移靠拢段采用CCD-标志灯型光学成像敏感器,存在固有的杂光干扰问题;
神舟十一号起,平移靠拢段采用CRDS型光学成像敏感器,追踪飞行器发出2种谱段的激光,对无源合作目标被动反射的成像进行差分,从原理上极大提升了抗杂光干扰和目标识别的能力。

表1 交会对接各阶段敏感器配置及选择策略Table 1 Sensor configuration and selection strategy at each stage of rendezvous and docking
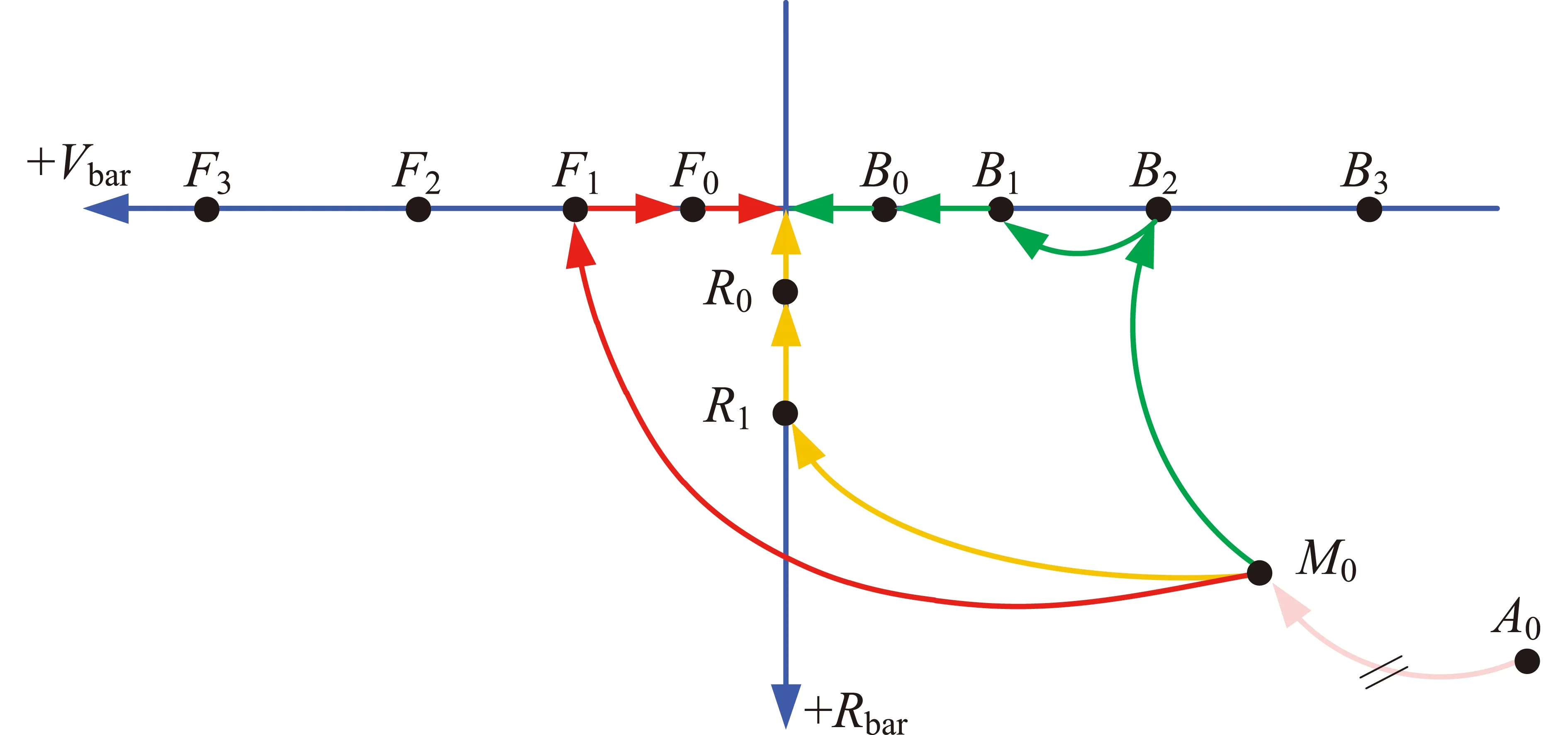
从空间站阶段神舟十二号起,增加2台STS,不但提高了姿态测量和姿态确定精度,而且满足了空间站时代新增的径向交会对接任务需求。考虑到空间站后向对接货运飞船,遮挡了交会对接敏感器合作目标,图2所示的神舟八号~神舟十一号采用的后向多停泊点交会对接不再适用,空间站时代神舟载人飞船近程交会对接采用无停泊的直接式快速交会对接,神舟十二号和神舟十五号为直接式前向,神舟十三号和神舟十四号为直接式径向,见图3。自主远程导引与近程自主直接式交会对接相结合构成的自主快速直接式交会对接,标志着我国完成了空间交会对接基本技术的更新换代。

注:+Vbar为正速度方向,Rbar为地心径向方向;
F0~F3为前向停泊点;
B0~B3为后向停泊点;
R0~R3为径向停泊点;
A0为寻的段初始点。图2 后向停泊点交会Fig.2 Rearward docking point rendezvous
注:M0为直接式快速交会对接的中瞄点。图3 直接交会Fig.3 Direct rendezvous
货运飞船、问天/梦天实验舱、巡天空间望远镜的交会对接与神舟载人飞船一致,只是它们不载人,平移靠拢段光学成像敏感器故障情况下,需要借助空间站内的航天员采用人控遥操作实现120 m内的交会对接[6-11]。
空间站从单舱到完整构型,组合体可能的构型有46种之多,转动惯量变化2个数量级,不同发动机组产生的喷气加速度差别达3个数量级。相对通常的航天器,空间站是含有极低频特性的超大型组合体,大尺度挠性太阳翼的基频为0.04 Hz,是国内频率最低的大尺度航天器;
另外,空间站科学应用性和作为交会对接合作目标的要求,要求空间站组合体的姿态测量精度为0.02°,姿态控制精度为0.15°,姿态稳定度为0.001(°)/s。极低频超大型空间站组合体长期日常运营期间,一般工作在力矩平衡姿态,将空间环境干扰力矩减为最低,同时最优设计角动量控制和管理,见图4;
配合交会对接最后平移靠拢期间,及时消除来访航天器进入停泊点带来的羽流干扰,满足交会对接对姿态精度和姿态稳定度的要求,见图5。空间站的姿态控制集中了航天器姿态控制的众多难点。
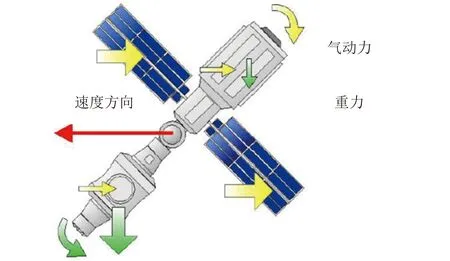
图4 力矩平衡姿态示意Fig.4 Moment balance attitude diagram
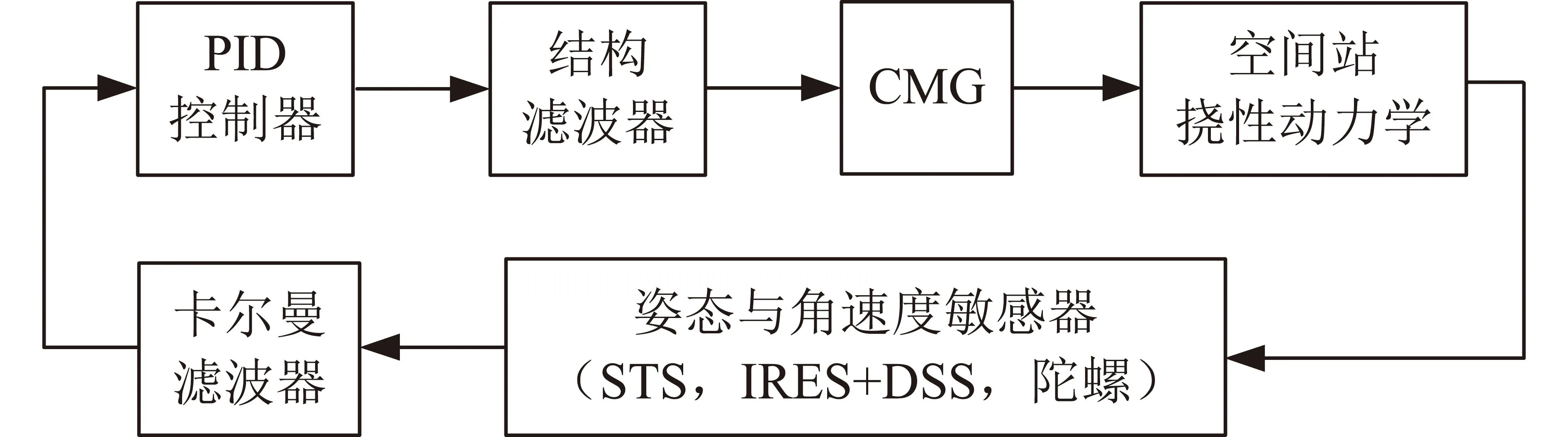
图5 空间站交会对接期间利用CMG的姿态控制框图Fig.5 Block diagram of attitude control using CMG during rendezvous and docking of space station
空间站长期飞行采用轨道系正向飞行姿态,采用控制力矩陀螺(CMG)为主、喷气为辅的方案。信息系统采用4条1553B总线,组合体共配置10台STS、6台红外地球敏感器、9套IMU、3台GNC控制器(GNCC)、110台发动机、12个CMG,通过总线融合使用。组合体控制以核心舱为主,问天实验舱作为备份,通过1553B总线融合使用。核心舱、货船、问天实验舱发动机进行组合体姿态轨道控制,三轴姿态角偏差优于0.6°,姿态稳定度优于0.008(°)/s。核心舱和问天实验舱各配置6台1500 N·ms单框架CMG,具备舱间重构能力的空间站GNC系统采用构型参数化配置的通用化设计方案,以“比例-积分-微分(PID)+结构滤波器”控制方案为核心,对各类应用场景采取精细化设计,大角度姿态变化时采用姿态轨迹设计目标姿态,设计低/高带宽轨道系/惯性系力矩平衡姿态控制算法,对喷气控制采用软脉宽调制算法,设计了饱和后全量和实时控制期间常值干扰2种角动量卸载算法,以及实验舱转位故障时的姿态控制方案、机械臂转运货盘中的姿态控制等。
空间站挠性太阳翼模型和参数的准确性对姿态稳定性和性能指标影响很大,GNC系统在核心舱设计和实施了太阳翼挠性测量与控制试验,通过获取的数据和图像,辨识了核心舱太阳翼在轨频率、振型、阻尼等柔性动力学参数,将天地计算差异“举一反三”到问天实验舱和梦天实验舱,直接支持了核心舱+两船组合体、核心舱+问天实验舱+两船组合体、核心舱+问天实验舱+梦天实验舱+两船/三船组合体的控制系统参数的最终确定[12]。
自主健康管理是各个载人航天器都具备的,空间站由于设备多、舱段多,空间站组合体的健康管理更为典型。空间站GNC系统的故障诊断特点是:①系统复杂,200余套设备,运行寿命要求15年,设备与系统参数多,单舱近千个,多舱段几千个;
②典型闭环系统,故障征兆在闭环内传播,故障源定位难;
③系统冗余丰富,可利用解析冗余关系实现故障检测与诊断。GNC系统采用分层自主诊断策略。部件级诊断是针对部件的输入-输出关系、运行状态(如温度、电流)、通信状态及自检状态等,利用专家知识和定性模型知识直接对部件自身进行诊断;
组件级诊断是根据部件之间的解析冗余关系进行诊断。系统级诊断是通过系统关键性能参数(如推力器喷气时间、姿态、角速度)的阈值检验与监测,实现系统级故障定位。分层自主诊断策略,首先充分利用部件的自身测量点和系统的解析冗余关系,优先利用自身信息在故障根源发现故障;
其次通过同类部件或不同类部件联合诊断发现故障;
最后通过系统级参数诊断出故障。在诊断出故障后,空间站GNC系统三舱设备丰富的冗余关系对三舱设备融合使用,实现健康管理。对于姿态测量功能,三舱敏感器可融合使用,并设计了多种姿态确定方式;
对于姿态控制功能,核心舱和问天实验舱的CMG可融合使用,核心舱、货运飞船、问天实验舱、梦天实验舱的推力器可融合使用,并可根据事先指定的优先级进行推力器分组切换。
针对系统级故障,空间站GNC系统设计了对日定向、停止控制和全姿态捕获3种安全模式。在对日定向或停止控制2种安全模式下,地面进行故障排查,故障排除后通过全姿态捕获恢复对地稳定或惯性定向姿态[12]。
计划2024年发射的巡天空间望远镜,主要任务是宇宙探测,完成全天球的巡天探测和重点关注区域的精细探测。在精细探测方面,对光轴精度、绕光轴精度的要求为亚角秒级,稳定度的要求为毫角秒每秒级;
在高效完成全天球巡天探测方面,按探测区域大小对空间机动性和稳定时间提出分类且严格的要求。巡天空间望远镜与空间站组合体共轨飞行,当有故障或需要维护时,巡天空间望远镜作为主动航天器可以与空间站交会对接,接受维修与维护。
为了满足技术指标的要求,巡天空间望远镜采用三级复合控制。采用平台一级(下平台)姿态轨道控制、主动指向超静平台二级(上平台)姿态控制、精密稳像系统三级稳像控制,见图6。各级在控制带宽、控制目标、控制系统组成上各有不同,通过协同定姿和一体化控制系统设计,实现性能指标逐级提升。采用宽频多源多级的协同定姿方法,导星仪相对姿态与陀螺绝对信息协同滤波修正,解决以载荷指向为基准的高精度多级姿态确定问题;
采用平台与精密稳像一体化多级协同控制方法,解决复杂扰动全频段抑制难题;
设计巡天主动阻尼和稳态观测相对控制的复合控制策略,解决稳定时间对巡天效率的约束问题[13-14]。

图6 三级控制系统示意Fig.6 Schematic diagram of three-level control system
巡天空间望远镜将是我国研制的最高精度的航天器,促进了我国航天姿态测量和姿态控制技术向更高精度和更高稳定度的发展。在核心部件方面,研制了亚角秒级极高精度STS、甚高精度三浮陀螺、中大型超静单框架控制力矩陀螺、超大磁矩磁力矩器、可重复锁紧的高精度指向隔振机构(作动器)、甚高精度测微敏感器等。
我国空间站进入运营阶段之后,作为天地往返运输系统的神舟载人飞船还保有进一步发展的空间。对照“国际空间站”(ISS)运营期间的载人飞船技术,俄罗斯联盟MS系列载人飞船在交会对接用时和返回再入用时都是最少的,从发射到对接ISS最少用时3 h3 min,脱离ISS到落地最少用时3 h21 min[15]。我国神舟载人飞船自主快速交会对接用时稳定在6.5 h,神舟十三号载人飞船返回用时9 h12 min,神舟十四号载人飞船返回用时9 h9 min。通过适当配置,并对运载火箭提出新的入轨条件,可将神舟载人飞船交会对接用时减少至2 h左右。其中,2 h交会对接方案已由我国天舟二号货运飞船完成了试验性在轨验证[16-17],天舟五号完成了2 h快速交会对接任务飞行,期待后续推广到更具实际应用价值的神舟载人飞船上。
快速返回的技术实质或精髓就是兼顾快速性和精准性,这是由载人航天客观要求所决定的。神舟载人飞船减少返回再入用时,提高应对严重故障的能力,在实际飞行任务中是有切实紧迫需求的,例如电源系统衰减故障需要快速返回或天地测控回路故障,需要飞船上具备自主快速返回功能作为解决方案。快速返回必须依靠自主导航、自主轨迹规划与制导控制一体化技术,这两项技术在新一代载人飞船试验船上已经成功实践。目前,神舟载人飞船GNC系统已经完成自主快速返回技术的全部工作,形成软件版本,可应用于正常返回、自主应急返回、第2圈返回及应急救生等各类涉及返回再入的场景,只要载人飞船工程管理部门同意,神舟载人飞船就能具备2 h或1 h自主快速交会和2 h自主快速返回的能力,成为空间站运营阶段具有强故障应对能力的智能型全自主载人飞船,进入国际领先阵列。神舟载人飞船最新的技术状态可作为新一代载人飞船的起点,促进我国载人飞船技术向更加可靠、安全、精准、快速、自主的目标发展。
载人月球探测航天器含新一代载人飞船和载人着陆器。在神舟载人飞船、嫦娥五号月球探测器的基础上,为了确保正常和故障(包括天地测控回路故障)情形下航天员的安全,载人月球探测航天器需要增加智能自主控制能力。对新一代载人飞船,需要研制涵盖正常返回、应急返回、逃逸救生等从亚轨道至月地轨道大范围的返回轨道和制导律的在线自主规划与生成一体化技术;
对载人着陆器,需要研制高精度定点月面超软着陆GNC技术;
载人飞船和着陆器相互配合完成的交会对接,需要研制月地轨道近月制动-环月轨道、月面上升-环月轨道的轨道控制与交会对接一体化技术,着陆器载航天员在应急故障下的轨道抬升与交会对接;
人控作为关键任务自动控制的备份,需要在着陆避障[18]、交会对接、返回再入等方面发挥人的作用。
参考文献(References)
[1] 胡军,陈祖贵,刘良栋,等.神舟飞船GNC分系统研制与飞行结果评价[J].航天器工程,2004,13(1):24-29
Hu Jun, Chen Zhonggui, Liu Liangdong, et al. Develop ̄ment of guidance, navigation and control system of Shenzhou spacecraft and evaluation of flight results [J]. Spacecraft Engineering, 2004, 13(1): 24-29 (in Chinese)
[2] 胡军.载人飞船全系数自适应再入升力控制[J].宇航学报,1998,19(1):8-12
Hu Jun. All coefficients adaptive reentry lifting control of manned spacecraft [J]. Journal of Astronautics, 1998, 19(1): 8-12 (in Chinese)
[3] 胡军,张钊.载人登月飞行器高速返回再入制导技术研究[J].控制理论与应用,2014,31(12):1678-1685
Hu Jun, Zhang Zhao. A study on the reentry guidance for a manned lunar return vehicle [J]. Control Theory & Applications, 2014, 31(12): 1678-1685 (in Chinese)
[4] 王勇,杨鸣,于丹,等.嫦娥五号跳跃式再入制导、导航与控制技术[J].中国科学:技术科学,2021,51(7):799-812
Wang Yong, Yang Ming, Yu Dan, et al. Skip-reentry guidance, navigation, and control technology for the Chang’e-5 lunar-return vehicle [J]. Scientia Sinica Technologica, 2021, 51(7): 799-812 (in Chinese)
[5] 胡军,李毛毛.航天器进入制导方法综述[J].航空学报,2021,42(11):525048
Hu Jun, Li Maomao. Review of spacecraft entry guidance method [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 525048 (in Chinese)
[6] 胡军,解永春,张昊,等.神舟八号飞船交会对接制导、导航与控制系统及其飞行结果评价[J].空间控制技术与应用,2011,37(6):1-5,13
Hu Jun, Xie Yongchun, Zhang Hao, et al. Shenzhou-8 spacecraft guidance navigation and control system and flight result evaluation for rendezvous and docking [J]. Aerospace Control and Application, 2011, 37(6):
1-5, 13 (in Chinese)
[7] 解永春,张昊,胡军,等.神舟飞船交会对接自动控制系统设计[J].中国科学:技术科学,2014,44(1):12-19
Xie Yongchun, Zhang Hao, Hu Jun. et al. Automatic control system design of Shenzhou spacecraft for rendezvous and docking [J]. Scientia Sinica Technologica, 2014, 44(1): 12-19 (in Chinese)
[8] 胡海霞,解永春,胡军.神舟飞船交会对接人工控制系统设计[J].中国科学:技术科学,2014,44(1):34-40
Hu Haixia, Xie Yongchun, Hu Jun. Shenzhou spacecraft rendezvous & docking manual control system design [J]. Scientia Sinica Technologica,2014, 44(1): 34-40 (in Chinese)
[9] 彭坤,李民,果琳丽,等.近地轨道航天器快速交会技术分析[J].航天器工程,2014,23(5):92-102
Peng Kun, Li Min, Guo Linli, et al. Quick rendezvous analysis for spacecraft in low earth orbit [J]. Spacecraft Engineering, 2014, 23(5):
92-102 (in Chinese)
[10] 杨璐茜.中国人首次进入自己的空间站[J].卫星应用,2021(6):4-5
Yang Luxi. The Chinese enter their own space station for the first time [J]. Satellite Application, 2021(6):4-5 (in Chinese)
[11] 张强,陈长青,刘宗玉,等.天舟二号货运飞船全相位自主快速交会对接技术和在轨验证[J].空间控制技术与应用,2021,47(5):33-39
Zhang Qiang, Chen Changqing, Liu Zongyu, et al. All-phase autonomous quick rendezvous and docking technology and orbit verification of Tianzhou-2 cargo spacecraft [J]. Aerospace Control and Application, 2021, 47(5):
33-39 (in Chinese)
[12] 张军,张志方,刘成瑞,等.中国空间站GNC系统设计与在轨验证[J].中国科学:技术科学,2022,52(9):1355-1374
Zhang Jun, Zhang Zhifang, Liu Chengrui, et al. Design and on-orbit verification of the guidance, navigation and control system of the China space station [J]. Scientia Sinica Technologica, 2022, 52(9): 1355-1374 (in Chinese)
[13] 百度百科.巡天号光学舱[EB/OL].[2022-11-12].https://baike.baidu.com/item/巡天号光学舱
Baidu Baike. Sky Survey space telescope [EB/OL]. [2022-11-12]. http://baike.baidu.com/item/Sky Survey space telescope (in Chinese)
[14] 汤亮,关新,王有懿,等.一种航天器基于三超平台的多级复合控制方法:中国,ZL201618006539.8[P]. 2019-12-13
Tang Liang, Guan Xin, Wang Youyi, et al. A multi-stage composite control method for spacecraft based on three super platforms:
China, ZL201618006539.8 [P]. 2019-12-13 (in Chinese)
[15] SPACE FACTS. The mission report of manned spaceflights [EB/OL]. [2022-03-23]. https://www.spacefacts.de/english/flights.htm
[16] 中国载人航天.天舟二号货运飞船再入大气层任务顺利完成[EB/OL].[2022-03-31]. https://www.cmse.gov.cn/xwzs/202203/t20220331_49453.html
China Manned Space. The re-entry mission of Tianzhou-2 cargo spacecraft was successfully completed [EB/OL]. [2022-03-31].https://www.cmse.gov.cn/xwzs/202203/t20220331_49453.html (in Chinese)
[17] 中国载人航天.天舟五号货运飞船与空间站组合体完成自主快速交会对接,中国航天员首次在空间站迎接货运飞船来访[EB/OL].[2022-11-12]. https://www.cmse.gov.cn/xwzs/202211/t20221112_51420.html
China Manned Space. The Tianzhou-5 cargo spacecraft and the space station assembly completed rapid rendezvous and docking, and Chinese astronauts welcomed the cargo spacecraft’s visit to the space station for the first time [EB/OL]. [2022-11-12]. https://www.cmse.gov.cn/xwzs/202211/t20221112_51420.html (in Chinese)
[18] 田林,戚发轫,果琳丽,等.载人月面着陆地形障碍探测与规避方案研究[J].航天返回与遥感,2014,35(6):11-19
Tian Lin, Qi Faren, Guo Linli, et al. Study of terrain hazard detection and avoidance scheme for human lunar landing [J]. Spacecraft Recovery & Remote Sensing, 2014, 35(6): 11-19 (in Chinese)
猜你喜欢实验舱组合体交会梦天实验舱,发射!军事文摘(2023年2期)2023-02-17认识梦天实验舱新少年(2022年12期)2023-01-14走近空间站实验舱军事文摘(2022年20期)2023-01-10中国空间站首个实验舱——“问天”来了中学生数理化·八年级物理人教版(2022年11期)2022-02-14空间站组合体3D展示产品军民两用技术与产品(2021年10期)2021-03-16“拆”解组合体求积问题中学课程辅导·教育科研(2019年3期)2019-09-102019年,水交会来了!当代水产(2019年1期)2019-05-16不同组合方式煤岩组合体强度及声发射特征分析煤矿安全(2019年2期)2019-03-20立方体星交会对接和空间飞行演示太空探索(2016年9期)2016-07-12一切以交易的名义——首届黑马创交会揭秘创业家(2015年1期)2015-02-27版权所有:上派范文网 2010-2024 未经授权禁止复制或建立镜像[上派范文网]所有资源完全免费共享
Powered by 上派范文网 © All Rights Reserved.。沪ICP备12033476号-1